Descrição do produto
KSMIT3: Um sistema de referência e título de atitude independente
KSMIT3 é um sistema de referência e cabeçalho de atitude de última geração que vem como um módulo independente totalmente funcional.Seu design é baseado em um número limitado de componentes de hardware, o que facilita a integração em qualquer sistema.
Este sistema inovador possui um protocolo de comunicação totalmente documentado e padrão do setor, que permite a personalização de mensagens de dados em termos de frequência, formato de saída e dados.O sinal é processado inteiramente na placa, que utiliza apenas uma pequena quantidade de recursos do host.Esse recurso torna o KSMIT3 ideal para uso em ambientes operacionais simples de MCU.
O KSMIT3 apresenta alta precisão sob condições dinâmicas com precisão de rotação e inclinação de 1 grau RMS, bem como precisão de deflexão de 2 graus RMS.Sua saída é altamente estável, tornando-o perfeito para uso no controle e estabilização de qualquer objeto ou navegação, como drones.
Características
● AHRS de desempenho total em módulos de 12,1 x 12,1 mm
● Precisão de flip/pITch (dinâmica) 1,0 graus
● Precisão de direção de 2,0 graus
● Requisitos extremamente baixos para o processador principal
● Interface unificada para todo o ciclo de vida do produto
● Baixa potência (45 mW a 3,0V)
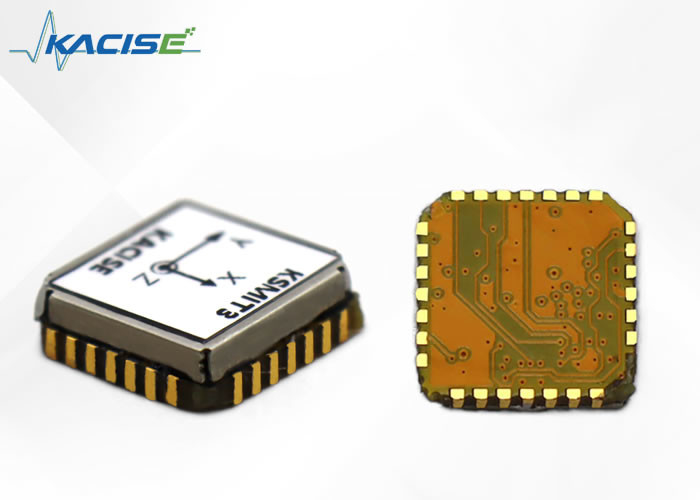
● Compatível com PCB PLCC28 (12,1 x 12,1 x 2,6 mm)
Parâmetros técnicos
| ITEM |
PARÂMETROS (VALORES TÍPICOS) |
| PRECISÃO DE ATITUDE |
Precisão de guinada (dinâmica) |
2 graus (rms) |
| Precisão de rotação/pITch (dinâmica) |
1 grau (rms) |
| GIROSCÓPIOS |
Escala completa |
±2000°/s |
| Estabilidade de polarização durante a execução |
10°/h |
| Não-linearidade |
0,1% |
| Variação do fator de escala |
0,05% |
| g-SensITivIDADE |
0,1°/s/g |
| Densidade de ruído |
0,01º/s/√Hz |
| Largura de banda (-3dB) |
180 Hz |
| ACELERÔMETROS |
Escala completa |
±16g |
| Estabilidade de polarização durante a execução |
0,1 mg |
| Não-linearidade |
0,5% |
| Variação do fator de escala |
0,05% |
| Densidade de ruído |
200 μg/√Hz |
| Largura de banda (-3dB) |
180 |
| MAGNETÔMETRO |
Escala completa |
6 gauss |
| Não-linearidade |
0,1% |
| Resolução |
120 ugauss |
| Ruído (rms) |
50 ugauss |
| INTERFACES |
Tensão de alimentação |
3,3 V CC |
| comunicação por porta serial |
TTL |
| Frequência de saída |
Taxa de transmissão de 100 Hz @ 230400 |
Quadros de referência
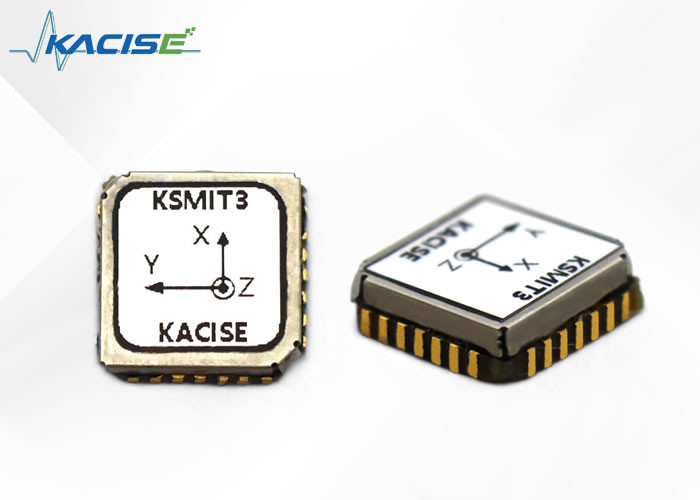
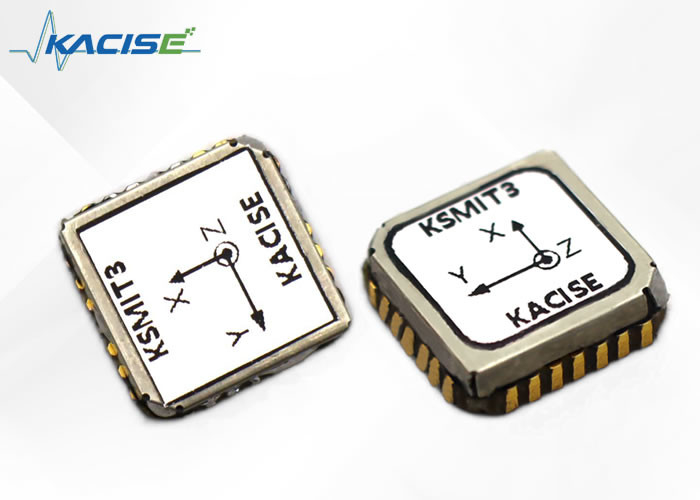
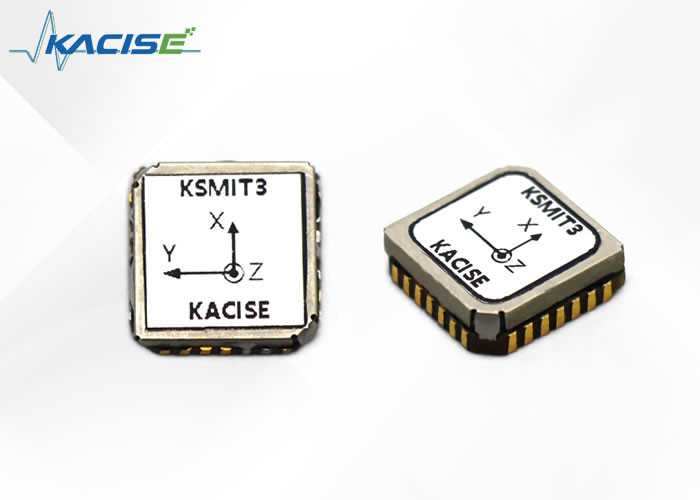
O KSMIT3 usa um sistema de coordenadas para destros e a estrutura do sensor padrão é definida conforme mostrado na Figura 13. Para uma localização mais exata da origem da estrutura do sensor, consulte o manual de Integração de Hardware.Algumas das saídas de dados comumente usadas com seu sistema de coordenadas de referência de saída estão listadas na Figura 1.
 Figura 1 Sistema de coordenadas fixas de sensor padrão para módulo KSMIT3
Figura 1 Sistema de coordenadas fixas de sensor padrão para módulo KSMIT3
Protocolo de comunicação do usuário
A taxa de transmissão é 115200bps, 230400bps e 460800bps.Bit de dados 8, bit de parada 1, sem bit de verificação.Os bytes altos vêm primeiro e os bytes baixos vêm por último.Frequência de atualização de dados f=100Hz.A taxa de transmissão padrão é 230400bps.
| Número de bytes |
Nome |
Tipo de byte |
Magnífico-cátion |
Faixa |
UnISTO |
Descrição |
| 1~2 |
Cabeçalho do quadro |
U,2 |
|
|
|
0XAA 71 |
| 3 |
Número do formato do quadro |
Valor Fixo 3=0x03 |
| 4 |
Comprimento do quadro de comunicação |
Valor Fixo 100=0x64 |
| 5~13 |
Giroscópio |
S,3*3 |
1e-4 |
±838,8608 |
°/s |
X/Y/Z Direita/Frente/Superior |
| 14~22 |
conta |
S,3*3 |
1e-5 |
±83,88608 |
g |
X/Y/Z Direita/Frente/Superior |
| 23~28 |
Magnético |
S,3*2 |
1e-2 |
±327,68 |
você |
X/Y/Z Direita/Frente/Superior |
| 29~31 |
Hbar |
S,1*3 |
1e-2 |
±83886,08 |
mbar |
Barômetro |
| 32 |
Bandeira |
U,1 |
|
|
|
BIT1-Marca Magnética Válida 1- Válida
BIT2-Bandeira Barométrica Válida 1- Válida
BIT3- GPS_existir
Informações GPS exIT ou não
0- Sem informações de GPS
1- Informações GPS disponíveis
Sinalizador válido de informações BIT4-GPS 1- Válido
BIT5-8 Preenchimento Zero
|
| 33~40 |
Palavras reservadas do sistema |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S,3*3 |
1e-4 |
±838,8608 |
EM |
GPS Leste/Norte/Céu Velocidade |
| 50~60 |
GPS_Lon/Lan |
S,2*4 |
1e-7 |
±214,7483648 |
° |
Longitude GPS/Latitude GPS |
| GPS_Hmsl |
S,1*3 |
1e-2 |
±83886,08 |
eu |
Altitude GPS |
| 61~62 |
GPS_Headmot |
S,1*2 |
1e-2 8 |
±327,6 |
° |
Direção GPS |
| 63 |
GPS_Status |
U,1 |
|
|
|
BIT1~4-Número de satélites de posicionamento GPS (máximo 15)
BIT5 -Marca de Posicionamento GPS 1 Válida
BIT6 ~ 8- Tipo de posicionamento GPS
GPS_ tipo fixo
0x00=Sem correção
0x01=Apenas cálculo morto
0x02=2d Correção
0x03 = correção 3d
0x04=Gnss+Recebimento Morto Combinado
0x05=Correção apenas de tempo
|
| 64~65 |
GPS_Pdop |
U,2 |
1e-2 |
|
|
|
| 66~71 |
Ins_Att |
S,2*2 |
1e-2 |
±327,68 |
° |
Ptich ±90° Rolo ±180° |
| S,1*2 |
655,36 |
° |
Guinada ±180° |
| 72~80 |
Vn |
S,3*3 |
1e-4 |
±838,8608 |
EM |
Vel_E/N/U |
| 81~89 |
Posição |
S,2*4 |
1e-7 |
±214,7483648 |
° |
Longitude latitude |
| S,1*3 |
1e-2 |
±83886,08 |
eu |
Altitude |
| 92 |
Modos e cenários |
U,1 |
|
|
|
BIT1~4- Modo de Trabalho
Alinhar=1;Ins=2;Ahs=3;Vg=4
BIT5~8- Cenário de Trabalho
1=A bordo;2=Interno;3=A Bordo 4=Asa Fixa;5=Rotor
|
| 93~96 |
reserva |
|
|
|
|
Preenchimento zero |
| 97~98 |
Temperatura |
S,2 |
1e-2 |
±327,68 |
℃ |
|
| 99 |
Contar |
U,1 |
|
|
|
|
| 100 |
Verifique o código |
|
|
|
|
Soma todos os caracteres antes do BIT de verificação |
Configuração de pinos
Figura 2: Configuração de pinos do módulo KSMIT3 (vista superior)
| Núm. |
Nome |
Tipo |
Descrição |
| 7 |
VDDIO |
Poder |
Tensão de alimentação digital |
| 8 |
GND |
| 23 |
UART_RX |
Interface UART |
Entrada de dados do receptor |
| 24 |
UART_TX |
Interface UART |
Saída de dados do transmissor |
| 25 |
GND |
| 18 |
AUX_RXA |
Interface GNSS auxiliar |
Entrada de dados do receptor do módulo GNSS |
| 19 |
UX_TX |
Interface GNSS auxiliar |
Saída de dados do transmissor para módulo GNSS |
| 20 |
SYNC_PPS |
Interface GNSS auxiliar |
Entrada de pulso por segundo do módulo GNSS |
Configurações de parâmetros
O produto é padronizado para o estado de "saída contínua" quando ligado e, para definir os parâmetros, o comando "parar saída" deve ser enviado primeiro.Atenção: Após usar o comando a seguir, o usuário deve ligar e reiniciar para mudar automaticamente para o estado de transmissão contínua.
1 saída de parada
Parar a saída é mudar o estado padrão de "saída contínua" na alimentação para o estado de "configuração de parâmetros".
Enviado para: * Espaço PA GS01 espaço STOP retorno de carro
Responder:
* Espaço PA GS01 espaço STOP espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço STOP espaço 1 retorno de carro com sucesso
2 Configure cenários de trabalho
O produto precisa alternar os parâmetros de filtro de acordo com diferentes cenários de aplicação.Os cenários de trabalho incluem montagem em carro, interior (mesa giratória), bordo de navio, asa fixa e rotor, com o cenário de bordo padrão para ligação.
A troca de cena serve para mudar a "cena do carro" padrão quando ligado para a cena real.
Enviar: * Espaço PA GS01 espaço CENAS espaço 1 retorno de carro
Responder:
* Espaço PA GS01 espaço CENAS espaço 1 espaço 0 retorno de carro Falha
*Espaço PA GS01 espaço CENAS espaço 1 espaço 1 retorno de carro Bem sucedido
Nota: Os caracteres sublinhados incluem 1 montado em carro, 2 em interior, 3 em navio, 4 em asa fixa e 5 em rotor opcional.
3 Definir taxa de transmissão
A taxa de transmissão padrão para ligar é 230400bps, que pode ser alterada enviando comandos.
Enviar: * Espaço PA GS01 espaço BAUD espaço 1 retorno de carro
Responder:
* Espaço PA GS01 espaço BAUD espaço 1 espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço BAUD espaço 1 espaço 1 retorno de carro Bem sucedido
Nota: O conteúdo dos caracteres sublinhados é 1-115200bps, 2-230400bps e 3-460800bps, que são opcionais.
4 Restaure as configurações de fábrica
A restauração das configurações de fábrica envolve definir a cena de trabalho, o formato do quadro, a taxa de transmissão, a declinação magnética e a calibração do campo magnético para os valores padrão.
Enviar: * Espaço PA GS01 espaço RESET retorno de carro
Responder:
* Espaço PA GS01 espaço RESET espaço 0 retorno de carro falhou
*PA espaço GS01 espaço RESET espaço 1 retorno de carro com sucesso
5 Defina o ângulo de declinação magnética
A declinação magnética padrão é 0, com nordeste magnético positivo e oeste magnético negativo.
Enviar: * Espaço PA Espaço GS01 Espaço MDEC+/- Retorno de carro XX.XX
Responder:
* Espaço PA GS01 espaço MDEC espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço MDEC espaço 1 retorno de carro bem-sucedido
Nota: Se o ângulo de declinação magnética for -2,5 graus, a sequência de sublinhado será -02,50;Se o ângulo de declinação magnética for +1,5 graus, a sequência de sublinhado será +01,50.
6 Calibração de campo magnético
Na operação de sensores magnéticos, é inevitável que a TI seja afetada pela interferência dos campos eletromagnéticos circundantes, o que pode levar a vários graus de desvio e deformação da intensidade do campo magnético do eixo XYZ medida pelo sensor magnético.A calibração do campo magnético visa compensar a interferência magnética suave e forte por meio do aprendizado de algoritmo do ambiente do campo magnético circundante.Portanto, recomendamos fortemente que a calibração do campo magnético seja implementada após cada instalação e após alterações no ambiente do campo magnético.
Ao realizar a calibração do campo magnético, as substâncias interferentes circundantes devem permanecer inalteradas (ou seja, girar com o produto) durante o processo de rotação do produto e a posição relativa do produto.A calibração exige que o operador não tenha telefones celulares, cartões magnéticos, chaves ou dispositivos metálicos ou elétricos que possam afetar o campo eletromagnético em seu corpo.
Atenção: Somente dentro da faixa de interferência limitada a operação de calibração do campo magnético pode ter um efeito de compensação.O alcance do sensor magnético está aproximadamente entre mais e menos 1 Gauss, que é aproximadamente o dobro do campo geomagnético no hemisfério norte.Se o valor de interferência do campo magnético exceder mais ou menos 0,5 Gauss, o magnetômetro poderá atingir o estado de saturação, o que dificulta o efeito de compensação.Quando a calibração falha, o IT indica que o problema ocorreu.
Calibração 2D
Nota: Quando o produto não consegue girar em 3D, a calibração 2D pode ser usada.Recomenda-se que o ângulo de inclinação real do produto seja inferior a 5 graus.A calibração 2D pode ser concluída através da interface ou porta serial emitindo comandos.
1. Iniciar calibração: Antes da calibração do usuário, envie
Enviar: * Espaço PA GS01 espaço MCAL espaço START retorno de carro
Responder:
* Espaço PA GS01 espaço MCAL espaço START espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço MCAL espaço START espaço 1 retorno de carro com sucesso
2 Pare a calibração: inicie a rotação horizontal por mais de 2 voltas e envie após a conclusão
Enviar: * Espaço PA GS01 espaço MCAL espaço END retorno de carro
Responder:
* Espaço PA GS01 espaço MCAL espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço MCAL espaço 1 espaço X: x.xx espaço Y: y.yy retorno de carro com sucesso
Nota: Retornar resultados de calibração de 0,90-1 indica bons resultados de calibração, enquanto >1,1 ou<0,9 indica resultados de calibração ruins.
3. Salvar resultados de calibração: Após a calibração do usuário, decida se deseja salvar com base nos resultados de calibração.
Enviar: * Espaço PA GS01 espaço MCAL espaço SAVE retorno de carro
Responder:
* Espaço PA GS01 espaço MCAL espaço SAVE espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço MCAL espaço SAVE espaço 1 retorno de carro com sucesso
4. Limpar resultados de calibração: Após a calibração, o usuário decide se deseja limpar com base nos resultados da calibração.
Enviar: * Espaço PA GS01 espaço MCAL espaço CLEAR retorno de carro
Responder:
* Espaço PA GS01 espaço MCAL espaço CLEAR espaço 0 retorno de carro falhou
*Espaço PA GS01 espaço MCAL espaço CLEAR espaço 1 retorno de carro com sucesso
Aaplicações
Veículos aéreos em miniatura
• Drones de entrega
• Drones de vídeo
• UAVs agrícolas
Máquinas
• Satcom em Movimento (SotM)
• Máquinas de construção
• Monitoramento de navios
Robótica
• Agricultura autônoma
• Automação de armazém
• Braços robóticos
Outras aplicações
• Dispositivos portáteis
• Navegação pedestre
• VR/AR e HMDs
• Auxílio à navegação
Suporte e Serviços:
Bem-vindo ao nosso Suporte Técnico e Serviços para o Sensor Giroscópio.Nossa equipe dedicada está aqui para ajudá-lo com quaisquer problemas técnicos ou dúvidas que você possa ter em relação ao uso, instalação ou manutenção do seu sensor giroscópio.Temos o compromisso de fornecer o melhor suporte possível para garantir que seu produto funcione de maneira ideal.
Nosso suporte inclui documentação detalhada do produto, perguntas frequentes (FAQs) e guias de solução de problemas projetados para ajudá-lo a resolver problemas comuns rapidamente.Para questões mais complexas ou específicas, nossa equipe de suporte técnico está pronta para prestar atendimento personalizado.
Se precisar de mais assistência, consulte a seção 'Fale Conosco' do nosso site (informações de contato excluídas conforme solicitação), onde você pode encontrar recursos adicionais e canais de suporte para entrar em contato com nossa equipe profissional de suporte técnico.
Obrigado por escolher nosso Sensor Giroscópio Eletrônico.Estamos ansiosos para atendê-lo e garantir o sucesso de seus projetos
Embalagem e envio:
O Sensor Giroscópio Eletrônico é meticulosamente embalado em uma embalagem antiestática para garantir proteção contra descarga eletrostática (ESD).O sensor é então encapsulado com segurança em um molde de espuma de alta densidade personalizado, que proporciona absorção de choque superior durante o transporte.Essa espuma é colocada dentro de uma caixa de papelão durável e de marca que protege o sensor de fatores ambientais e possíveis danos durante o transporte.
O exterior da caixa apresenta uma etiqueta clara com o nome do produto, instruções de manuseio e um código de barras para fácil rastreamento.Todas as nossas embalagens são lacradas com fita inviolável, oferecendo uma camada adicional de segurança.
Para envio, o Sensor Giroscópio Eletrônico é enviado por meio de um serviço de entrega confiável para garantir uma entrega oportuna e segura.Incluímos seguro no valor integral do produto, oferecendo tranquilidade e proteção ao seu investimento.As informações de rastreamento são fornecidas assim que a encomenda é despachada, permitindo o monitoramento em tempo real da remessa até a chegada ao destino.

 Por favor verifique seu email!
Por favor verifique seu email! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski